Conceptos de electrónica, máquinas no clasificadas en otros apartados, equipos de medida, cuestiones técnicas diversas, telecomunicación, informática, vídeo, televisión, cine, presentación de equipos, etc. ¿No sabemos bien dónde encajar lo que queremos decir? Aquí podemos hacerlo.
Amplificador en contrafase Push-Pull de tres transistores
De la serie de Montajes Didácticos con el NieP éste fue el segundo que realicé con el recién estrenado tablero. En este caso se trata de un amplificador es monofónico de mayor potencia de salida que el primero montado en clase A y sobre todo de un mayor rendimiento, pero que sobre el NieP resulta igualmente fácil de montar....
Los circuitos amplificadores de audio tipo A tienen normalmente una baja distorsión de salida, pero también el inconveniente de que su rendimiento es muy bajo, ya que su consumo es el mismo con independencia de la amplitud de señal con que estén trabajando, por este motivo los utilizaremos para pasos amplificadores intermedios o para alimentar auriculares o altavoces tipo monitor de muy baja potencia, pero no son adecuados para entregar potencias medias o altas, porque entonces el consumo y el calor que generarían serían desorbitados.
Para estos casos lo mejor es el circuito Push-Pull, palabras que en inglés significan literalmente Empuja-Tira, ya que la potencia de salida está controlada por dos transistores operando en contrafase de tipo B, lo cual a su vez quiere decir que cada uno de ellos sólo conduce durante media onda.
El circuito que propongo es el que figura en el siguiente diagrama:
Circuito del amplificador en contrafase Push-Pull de tres transistores
En el circuito anterior podemos seguir el camino de la señal, desde la toma de auricular del reproductor MP-3, en cuyo jack macho uniremos los dos canales de salida, ya que nuestro diseño, al ser monofónico, deberá reproducir ambos canales.
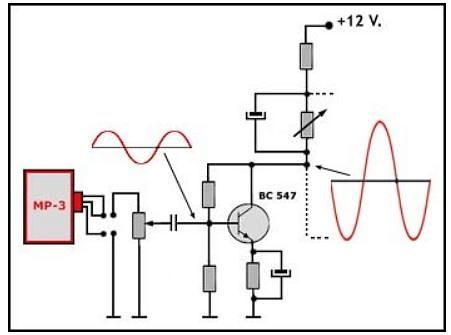
1) - El paso de entrada está constituido por el potenciómetro de 10K que servirá como control de volumen, seguidamente pasa a un paso amplificador con el transistor BC547, del tipo NPN, en la configuración normal denominada emisor-común. Con la carga constituida por las dos resistencias en serie (2,2 K fija + 2K ajustable) colocadas entre su colector y el positivo de alimentación.
En la siguiente imagen se puede ver aislada esta parte del circuito, con las formas de onda en la entrada y la salida, observando que al ser en emisor-común, la salida estará invertida en fase respecto a la entrada.
Paso de entrada driver, con las formas de onda de entrada y salida
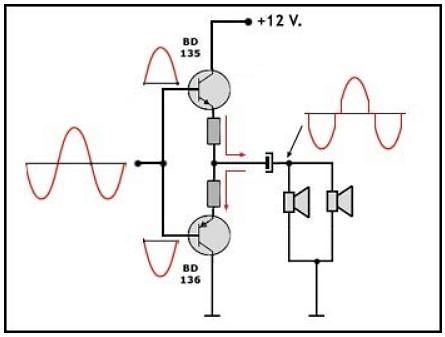
2) - La siguiente etapa es ya el Push-Pull de salida, formado por los transistores complementarios BD135 y BD136. La palabra "complementario" significa en este caso que ambos transistores son esencialmente iguales en características, con una ganancia y una potencia semejante, con la salvedad que uno de ellos es NPN (el BD135), y el otro PNP (el BD136), lo cual permitirá que la señal amplificada por el primer transistor se divida en dos semiondas, las positivas, que controlará el NPN, y las negativas que controlará el PNP.
La imagen siguiente muestra la configuración básica de un Push-Pull con transistores complementarios, con la división de semiondas y el resultado final. En esta etapa no hay ganancia de tensión ni inversión de fase, puesto que en realidad se trata de dos etapas simples en colector-común, montadas la una sobre la otra. Dicha configuración obtiene una apreciable ganancia en corriente, y es especialmente adecuada para actuar sobre la relativa baja impedancia de los altavoces de salida, que en este caso están conectados en paralelo, ya que de esta forma se obtiene una impedancia de la mitad y una potencia de salida más alta a partir del amplificador.
Configuración básica de una etapa Push-Pull de salida, con las formas de onda correspondientes
No obstante, en la configuración básica anterior debemos darnos cuenta de un detalle, y es que con este circuito concreto la onda de salida en bornes de los altavoces presentaría una notable distorsión en sus flancos más cercanos a la línea negra de referencia. Esta distorsión se debe a la tensión mínima de 0,6 Volts necesaria entre la Base y el Emisor de los transistores de silicio.
Por este motivo, la resistencia de carga del transistor anterior está subdividida en una resistencia fija de 2,2K y en otra variable de 2K, porque mediante esta última, que está precisamente conectada entre las dos Bases de los transistores finales, conseguiremos los 0,6+0,6=1,2 Volts necesarios para vencer el voltaje umbral de ambas bases, de esta manera, ambos transistores han de comenzar a conducir a la más mínima desviación de la señal de entrada.
Fijémonos en la imagen que viene a continuación. Con la resistencia ajustable puesta a su mínimo valor. Polarizaremos la base del transistor de entrada mediante la correcta relación entre R1 y R2, de manera que su colector se encuentre a una tensión con respecto a masa de 6 Volts, lo que equivale a 1/2 de la alimentación del circuito. Después insertaremos un miliamperímetro entre la fuente de alimentación y el circuito, y comenzaremos a ajustar la resistencia variable hasta que la intensidad llegue a 30 mA. En este punto la tensión entre la dos Bases ha de ser algo superior a 1,2 Volts y el circuito estará listo para funcionar.
Tensiones principales y sistema de polarización de la etapa Push-Pull mediante una resistencia ajustable entre sus bases
Bien, una vez hemos visto un poco por encima el circuito de nuestro amplificador, procederemos a elegir los materiales indicados en la tabla...
Lista de materiales:
1 Transistor BD-135 NPN
1 Transistor BD-136 PNP
1 Transistor BC-547 NPN
2 Resistencias de 4,7 Ohms
1 Resistencia de 100 Ohms
1 Resistencia de 2,2 K Ohms
1 Resistencia de 22 K Ohms
1 Resistencia de 100 K Ohms
1 Resistencia ajustable de 2 K Ohms
1 Condensador de poliester de 47 nF
1 Condensador de poliester de 100 nF
2 Condensadores electrolíticos de 22 uFaradios
1 Condensador electrolítico de 330 uFaradios
1 Condensador electrolítico de 1.000 uFaradios
1 Potenciómetro de 10 K Ohm Lineal
2 Altavoces de 50 Ohms
...Y los montaremos de la forma que figura en el siguiente diagrama, aunque naturalmente esto es sólo una recomendación, ya que un mismo circuito siempre puede montarse de muchas formas distintas.
Plano de montaje del circuito Push-Pull
En este diagrama he intentado reflejar la disposición real y la forma aproximada de los componentes y las conexiones entre ellos. Los transistores que figuran en negro están montados en su lado normal (caso del BD136), mientras los que figuran en gris (BC547 y BD135) están montados en posición invertida. Las resistencias se representan en color rojo, los condensadores de poliester en amarillo y los electrolíticos en azul (observar que estos tiene polaridad). En este diagrama también vemos la forma casi redonda de la resistencia ajustable.
El montaje sobre el tablero N-ieP es clásico, siguiendo la misma estructura del diagrama anterior de disposición de componentes. En esta ocasión he utilizado 17 puntos de interconexión, ocupando aproximadamente 1/6 parte del tablero.
Montaje del amplificador en contrafase Push-Pull, conectado a un reproductor MP-3 como fuente de sonido
En la imagen siguiente se ve mejor la situación de los componentes. Para los cables de conexión he utilizado diversos colores, más que nada por claridad.
Detalle del montaje, que ocupa 17 puntos de interconexión
El montaje está finalizado y ya hemos procedido al ajuste de los 30 mA, pero antes de realizar la prueba de fuego mostraré un pequeño cambio que he realizado en el tablero. Se trata de dos pequeños "bafles" construidos con cartón de 2 mm. endurecido con pegamento Imedio. Estos "bafles" tiene la misión de aislar acusticamente la parte inferior de los altavoces para mejorar su sonoridad y respuesta en el extremo bajo. Estos improvisados "bafles" ha sido fijados con pegamento termofusible.
Los dos "bafles" realizados en cartón endurecido con pegamento, destinados a mejorar la sonoridad de los altavoces
Y finalmente, la prueba de funcionamiento, utilizando como fuente de señal el reproductor MP-3 como fuente de señal ...Así suena Maná en nuestro improvisado amplificador...
Prueba de funcionamiento de nuestro amplificador a Push-Pull
Al cabo de un rato de funcionar con una calidad más que aceptable, la intensidad de reposo se mantiene estable en 30-32 mA, aunque como es normal aumenta al ritmo de la música, sin nunca superar los 100 mA. La distorsión es muy baja y el sonido sigue limpio incluso con el mando de volumen a más de 3/4. En cuanto a los sonidos más bajos, se notan bastante reforzados por la adición de los dos "bafles".
En resumen: un montaje sencillo e interesante, tanto para pasar una tarde de domingo como para aprender algunas cosas sobre funcionamiento interno de este tipo de amplificador.
...Hasta el siguiente montaje... Un saludo a todos.
Última edición por Llorens el Mié Oct 01, 2025 5:23 pm, editado 6 veces en total.
NieP - Receptor Superheterodino a transistores para Onda Media
Entre los genios que permitieron la popularización de la radio figura por derecho propio el ingeniero estadounidense Edwin Howard Amstrong, que ya siendo estudiante ideó el circuito Regenerativo, que permitía escuchar estaciones lejanas con una sola válvula de radio. Poco después inventaba el Superregenerativo, también muy sencillo y especial para ondas cortas, y con el tiempo fue el padre de la modulación en frecuencia (FM), que mejoraba la calidad del sonido al rechazar los ruidos parásitos... Pero sin duda, de todas sus realizaciones, la más importante fue el llamado Superheterodino, verdadero "Cum Laude" de los receptores de radio, y que en este caso vamos a construir.
A muchas personas el nombre de Superheterodino les puede resultar extrañísimo, y sin embargo, aún sin saberlo, la mayoría de ellas llevan la vida entera utilizando este tipo de receptores o aprovechando sus ventajas, porque las venerables radios de salón de nuestros padres y abuelos ya eran Superheterodinos, como también la parte receptora de los televisores, y los sintonizadores vía satélite, los Wi-Fi y los teléfonos móviles. Y a un nivel más profesional también los son algunas partes de los radioenlaces de voz y datos, de los radares y de la inmensa mayoría de los dispositivos que utilizan ondas electromagnéticas para comunicarse.
¿Pero que hace tan especial el Superheterodino? Pues sencillamente que su circuito soluciona de manera definitiva los principales problemas de la recepción, como son conseguir una muy alta sensibilidad para señales débiles, una excelente selectividad para separar las estaciones próximas y una buena calidad y estabilidad en la recuperación de las señales lanzadas al éter por un emisor. Por estos motivos, los superheterodinos se han impuesto en todos los campos en que se necesita asegurar el funcionamiento de las comunicaciones por radio, como en la radiodifusión comercial, en campos profesionales como la náutica, policía o bomberos, en la telefonía o en Internet, e incluso en las necesidades especiales y bastante exigentes técnicamente de las comunicaciones entre radioaficionados.
Edwin H. Amstrong, en una conferencia pronunciada ante el Radio Club of America
El sistema inventado por Amstrong se basa en mezclar dos señales, la procedente de la antena y la generada en el interior del receptor por un circuito denominado "Oscilador Local", la cual es algo distinta en frecuencia a la anterior. Por el efecto denominado "heterodino" el resultante de dicha mezcla son dos señales más; una de ellas la suma de las dos anteriores, y la otra su resta.
Para explicarlo mejor imaginemos que la señal de la frecuencia de recepción es de 1 Megahercio, es decir, 1.000 Kilohercios (Khz), mientras que el oscilador local es de 1.450 Khz. Las suma de ambas será de 1.000+1.450 = 2.450, mientras que la resta será 1.450-1.000 = 450 Khz. A la vez, estas señales resultantes serán en amplitud el producto de las dos señales originales, y ya que la señal de antena variará con la intensidad puntual de la estación que recibimos, sus sumas y restas también harán lo mismo.
Bien ¿Y ahora que hacemos con estas dos señales? Pues pasarlas a través de un filtro selector, que denominaremos de Frecuencia Intermedia (F.I.), que seleccionará una de ellas y eliminará la otra. Normalmente elegiremos seleccionar la más baja, en este caso de 450 Khz, y el motivo es que a estas frecuencias la selectividad o "ancho de banda" que el filtro dejará pasar es más "estrecha" en valores absolutos dados en kilohercios, es decir, con un receptor de este tipo podremos separar mucho mejor las emisoras próximas que en uno de Sintonía Directa o incluso que en un Regenerativo, sumando la ventaja sobre este último que el funcionamiento del Superheterodino añade a la señal recibida un ruido muy inferior.
Diagrama de bloques de un receptor Superheterodino
Naturalmente, un circuito capaz de realizar estas funciones será más complejo que otros tipos de receptores, pero dicha complicación sale a cuenta por el resultado que se consigue, de tal manera que, como ya hemos dicho con otras palabras, este tipo de circuitos han acabado representando el 99,9 % de todos los sistemas actuales de recepción.
Radio Superheterodino de lámparas Adwater Kent de 1935, un excelente representante de esta época
Dos receptores Superheterodinos a transistores, un Sony Multibanda Earth-Orbiter de los 70, y un Sanyo bastante anterior, de principios de los 60
En esta ocasión nos decantaremos por un montaje Superheterodino clásico pero con algunas soluciones experimentales para simplificar partes no esenciales. Después de algunos bocetos he dado forma al siguiente circuito, en el cual podemos distinguir una serie de elementos:
Circuito de nuestro receptor Superheterodino para Onda Media que montaremos con el N-ieP
1) El transistor de entrada T1, situado más a la izquierda, del tipo BF-198, realiza tres funciones distintas:
A) Por una parte, a través de la bobina L2, de sólo ocho espiras, recoge la señal de antena de las emisoras que queremos recibir, y que ya han sido sintonizadas y seleccionadas por el filtro resonante que forma la bobina L1, los condensadores asociados y naturalmente el núcleo de ferrita, que con su notable permeabilidad, muy superior a la del hierro, consigue captar con muy bajas pérdidas el componente magnético de las ondas de radio, que traduce en corriente eléctricas de alta frecuencia y que acaban en L2.
B) La bobina L3 es parte principal del llamado Oscilador Local, una especie de pequeño emisor de radio cuya señal prácticamente no sale del circuito, y que está calculado de manera que siempre oscile a una frecuencia 450 Khz más alta que la que tengamos sintonizada en L1. El condensador variable CV, cuyas dos partes se mueven al unísono por estar montadas sobre el mismo eje, tienen una relación de valores que permite que dicha diferencia (450 Khz) se mantenga en todo el margen de sintonía.
C) A la vez, como ambas señales, la de antena y la del oscilador local circulan a través del mismo transistor, se mezclan (se heterodinan) creando dos frecuencias resultantes que son precisamente la suma y la resta de ambas. Y esta segunda, la resta de 450 Khz, es precisamente la que va al transformador de frecuencia intermedia Tr1, sintonizado a este valor, y que por tanto pasa esta señal al siguiente circuito y rechaza todas las demás que sean más altas o más bajas de este valor.
2) El transistor T2 de Frecuencia Intermedia es también del tipo BF-198, que utilizo normalmente para radiofrecuencia en los montajes, y está conectado en una configuración clásica de emisor común. Esta etapa se caracteriza por trabajar a una frecuencia fija de 450 Khz e independiente de la señal que estemos recibiendo, y su principal función es añadir más "selectividad" al receptor, es decir, mayor capacidad de discriminar una emisora de otra que esté muy próxima, lo cual se consigue mediante los dos transformadores de FI, el Tr1 y el Tr2, ambos sintonizados a 450 Khz.
En un superheterodino normal, esta selectividad se concreta en un cierto "Ancho de Banda", que suele ser de +/- 4 ó 5 Khz a ambos lados de la frecuencia central (es decir, de 8 a 10 Khz en total), lo cual permite separar bien las emisoras y a la vez reproducir la voz y la música con buena calidad. Un receptor de comunicaciones destinado solamente a recibir voz necesitaría +/- 3 Khz, si fuera para recibir modulación de Banda Lateral Unica (BLU) este valor quedaría reducido a 1,5 Khz y para recibir señales de Morse sin modulación, es decir, onda continua, podría ser incluso tan estrecha como de 100 Hz, aunque entonces esta parte del circuito ya sería mucho más compleja y además de filtros basados en bobinas y condensadores precisaría de resonadores de cuarzo que para un aficionado no son fáciles de conseguir.
3) A la salida de Tr2 y antes del potenciómetro de volumen de 10 K vemos el diodo detector de germanio, que rectifica la señal alterna de alta frecuencia. El condensador de 10 nF filtra la componente para recuperar la señal de modulación, es decir, la que contiene el sonido y la música.
4) La parte amplificadora de baja frecuencia (BF), llamada tabién AF por "audiofrecuencia", está formada por dos etapas en serie con transistores BC-547. El primero de ellos es el preamplificador y el segundo la etapa final que ataca los dos altavoces de media impedancia. Ambos transistores trabajan en Clase A, y en el final utilizamos el truco de limitar la corriente con una resistencia de 330 Ohms y desacoplarla luego para la señal de alterna con un condensador electrolítico, con lo cual conseguimos un volumen aceptable con un bajo consumo (20 mA), aunque sea a costa de añadir una pizca de distorsión.
Receptor Superheterodino para Onda Media - Los materiales
La lista de materiales para este montaje es la siguiente:
1 Bobina doble de 50 y 8 espiras, con núcleo de ferrita
2 Transistores BF-198 NPN
2 Transistores BC-547
1 Diodo de Germanio OA95 - OA85
2 Resistencias de 220 Ohms
1 Resistencia de 330 Ohms
2 Resistencias de 470 Ohms
1 Resistencia de 2,7 K
1 Resistencia de 1 K
1 Resistencia de 10 K
1 Resistencia de 22 K
1 Resistencia de 47 K
3 Resistencias de 100 K
1 Resistencia de 470 K
2 Condensadores de 50 pF
1 Condensador de 470 pF
2 Condensadores de 560 pF
4 Condensadores de 10 nF
3 Condensadores de 47 nF
2 Condensadores de 1 uF
3 Condensadores electrolíticos de 47 uF
1 Condensador de 330 uF
1 Condensador de 470 uF
1 Condensador variable "Tandem" de 430+430 pF
2 Condensadores "Trimers" de 15-35 pF
1 Potenciómetro 10 K Lin (fijo en panel)
2 Altavoces de 62 Ohms (fijos en panel)
1 Antena de ferrita cilíndrica de 1 x 16 cm.
1 Bobina Oscilador Local de Lavis 767
2 Transformadores de FI de Lavis 767
A igual que ocurre con el circuito teórico, el montaje real ocupa una mayor extensión sobre el tablero N-ieP. La disposición sigue en lo posible un esquema "lineal" de izquierda a derecha, para que sean visibles las distintas partes. Para ello utilizaremos 36 contactos clip/muelle removibles y 13 fijos. En cuanto a los componentes propios del tablero, solamente usaremos uno de los potenciómetros de 10 K para control de volumen y los dos altavoces de media impedancia, que en esta ocasión irán conectados en serie.
Plano de montaje del radio-receptor Superheterodino de cuatro transistores, para Onda media
Pese a disponer de una idea del montaje, un circuito de estas características no puede abordarse al buen tun-tún, colocando los componentes y las conexiones, y esperando que salga andando a la primera, porque a diferencia de otros proyectos realizados hasta ahora con el N-ieP, el resultado final exige que varios módulos que funcionan bien por separado lo hagan también de forma coordinada. Especialmente las partes de radiofrecuencia como son el módulo de Frecuencia Intermedia y la etapa sintonizadora-osciladora-conversora.
En pocas palabras; en este caso es necesario ir por partes y no pasar a la siguiente antes de haber dejado lista la anterior. Comenzaremos por tanto montando el amplificador de baja frecuencia (BF), de dos transistores BC-547, uno de ellos trabajando como preamplificador, y el otro como paso de salida en clase A. Se podría argumentar que estos transistores son más bien "de señal" que no "de potencia", pero para conseguir unos de 200 mW. con que atacar los altavoces el BC-547 va sobrado y ni siquiera se calienta lo más mínimo mientras se mantenga a un volumen razonable.
Las dos siguientes imágenes muestran el amplificador de audio y la etapa de frecuencia intermedia, que se distingue por los dos filtros pasabanda, llamados también "transformadores de F.I.", en forma de pequeños cubos de aluminio con un tornillo de ajuste en la parte superior. Dicho tornillo sirve para variar la inductancia de la bobina interna, lo cual unido al condensador externo, que en este caso es de 560 pF, permite sintonizar el conjunto a una frecuencia alrededor de los 450 Khz.
Estos "transformadores" no son componentes que puedan improvisarse ni que puedan encontrarse en tiendas actuales de recambios, así que para conseguirlos la forma más fácil será a partir del reciclado de viejas placas. En este caso han salido de una radio Lavis 767 muy estropeada y con la caja rota que desguacé unas semanas antes de este montaje. De esta radio y de su circuito he aprovechado también los condensadores de 560 pF asociados a estos filtros y algunos elementos más que iremos viendo, aunque he de decir que no utilizo los "Transformadores de FI" tal como indica el esquema del Lavis, en donde van montados dos a dos y con acoplo capacitivo entre ambos, sino cada uno en solitario y usando solamente el acoplo inductivo interno entre el primario, que está sintonizado y es de media impedancia, y el secundario, que no está sintonizado y es de baja impedancia.
Primeras fases del montaje, el amplificador de baja frecuencia, la detección y la etapa de Frecuencia Intermedia
Detalle de la etapa de Frecuencia intermedia, con los dos transformadores sintonizados y el transistor BF 198
Otra cosa que no he dicho es que para este montaje no basta con solo tener un téster, necesitaremos también un generador de radiofrecuencia y un osciloscopio, instrumentos que era comunes en los talleres de antes y de los que muchos aficionados disponen. Así pues, una vez nos hemos asegurado que el conexionado del circuito es correcto y las polarizaciones están bien establecidas, ajustaremos nuestro generador de radiofrecuencia a 450 Khz y lo conectaremos la entrada del circuito de FI. Seguidamente daremos tensión al circuito y observando la señal con el osciloscopio, y con un pequeño destornillador (mejor si es especial de ajuste, con punta de material plástico para que el metal no efecte a la inductancia) iremos reajustando los núcleos de ambos transformadores para que la señal a la salida sea máxima, lo cual ocurrirá cuando los dos estén alineados entre ellos y a la frecuencia de 450 Khz.
La siguiente imagen muestra la pantalla del osciloscopio conectado a las salida de la etapa de FI, y puede verse perfectamente la radiofrecuencia amplificada, en este caso modulada al 60% por una señal sonora de 1000 Hz. Aquí, para saber qué ganancia obtiene este circuito, he comparado las señales de entrada y salida, y aplicando la fórmula:
Ganancia de tensión en Decibelios (db) = 20 x Log (V2/V1)
... Y siendo V2 la tensión de salida y V1 la de entrada he averiguado que con esta etapa obtengo una ganancia de 21 dB (unas 11,2 veces). Naturalmente, en caso que la de salida fuera menor que la de entrada, el resultado final no reflejaría una "ganancia" sino una "atenuación".
Una vez alineadas las Frecuencias Intermedias a 450 Khz con el generador de RF, comprobamos su ganancia con una señal modulada al 60%
Bien, ahora nos tocará montar la parte más compleja, formada por el circuito de antena, el oscilador local y parte mezcladora:
El circuito de antena estará formado por la antena de ferrita y la bobina que también hemos obtenido del desguace del Lavis (aunque podría utilizar el de un anterior montaje de receptor Reflex, con una bobina doble de 50 + 8 espiras) y un condensador variable de 300 pF que conectaremos sobre el tablero como si fuera un componente más.
A este respecto, vamos a decir que los Superheterodinos básicos de recepción de Onda Media y Corta llevan un condensador variable doble (llamado "tandem"), en que el mismo eje mueve ambas partes a la vez, y el motivo es que para sintonizar las emisoras necesitaremos ir variando al unísono dos elementos distintos: la frecuencia de sintonía de antena y la frecuencia del oscilador local, pero como la segunda es superior en 450 Khz a la primera, las dos partes del condensador no puede ser eléctricamente iguales, porque aún modificando la bobina osciladora, esta relación no se mantendría. Por este motivo, en los antiguos catálogos de radio se ofrecían también valores asimétricos de por ejemplo 400 + 200 pF o similares. Pero como esto complicaba la fabricación y la estandarización de modelos, la mayoría de las veces se construían iguales y luego se utilizaba un condensador fijo (llamado "padder") en serie con la parte variable del oscilador local, para conseguir que su capacidad máxima efectiva fuera casi la mitad de la de antena.
De momento nosotros no vamos a plantearnos este problema y para las primeras pruebas utilizaremos dos condensadores variables distintos; el que ya hemos citado de 300 pF que añadiremos con clips sobre el tablero N-ieP, y el propio integrado en el tablero y que ya hemos utilizado en otros montajes.
Tanto el circuito como la disposición de elementos de esta etapa ya se han visto en sus gráficos correspondientes. Entonces los montaremos como se ve en la siguiente imagen, observando los elementos que más destacan, como son la antena de ferrita, el condensador variable que hemos añadido y la bobina del oscilador local.
Detalle del primer montaje de la etapa osciladora-mezcladora, con la bobina de ferrita y utilizando dos condensadores variables para facilitar el ajuste
La bobina del Oscilador Local también la he obtenido del desguace del Lavis. Está dividida entre un primario sintonizado, con tres conexiones de salida (masa, punto caliente y salida de señal de baja impedancia) y un secundario de realimentación con dos conexiones que lo intercalan entre la salida del transistor y el primer transformador de F.I. Para poderla manejar esta bobina con más comodidad sin que se rompan los delgados hilos de Litz, la he fijado sobre un pequeño cuadrado de circuito impreso, de donde parten después los hilos de conexión al resto del N-ieP.
Bobina del Oscilador Local aprovechada del Lavis 767, su montaje e identificación de los terminales respecto al circuito
Al acabar de montar el circuito procederemos a su ajuste siguiendo esta secuencia:
1) Al darle al interruptor de alimentación, la primera cosa de que debemos cercionarnos es del consumo total. Para ello intercalaremos un miliamperímetro en el puente superior, el situado cerca del interruptor, y comprobar que no sube de los 35-40 mA. Realizo la prueba y veo que el consumo está en 32 mA, lo cual es más que correcto.
2) Seguidamente comprobaremos que el oscilador local está trabajando. Para ello acercaremos una radio de transistores común a nuestro montaje, y la sintonizaremos en Onda Media sobre los 1.300 Khz. Después colocaremos el mando del condensador variable de nuestro Oscilador Local en el extremo bajo, de menor frecuencia, y comenzaremos a girarlo lentamente hacia el tope alto de la banda. En algún momento hemos de escuchar en la radio el paso de la onda portadora. Si llegamos al final de la banda y no hemos oído nada, podemos afirmar que no oscila. Esto será normalmente un problema de conexionado, así que intercambiaremos las dos conexiones del secundario de realimentación y volveremos a hacer la prueba.
3) Ahora aumentamos hasta el tope el potenciómetro de volumen, colocamos el mando del condensador en del Oscilador Local en la zona media y comenzamos a mover el condensador variable de sintonía de antena hasta que notemos algún pequeño aumento de ruido.
Sobre esto debemos decir que si tenemos los transformadores de Frecuencia Internedia totalmente desalineados entre ellos, será muy difícil que oigamos nada, pero si hemos obtenido los transformadores de un aparato que más o menos funcionaba, y sobre todo si los núcleos de ajuste aparecen con su cera de sellado intacta, debemos suponer que están bien ajustados, probablemente no a 450 Khz, sino a 455 Khz, valor más frecuente en los aparatos de transistores y que nunca he entendido el porqué de su elección. Pues bien, no importa demasiado si están unos Kilohercios más arriba o más abajo, ya que lo determinante es su alineación.
4) En todo caso, por poca cosa que oigamos, como una estación en forma muy débil o un aumento del ruido de fondo, ya nos podría servir para alinear los transformadores de FI, dejaremos el primero como está y con nuestro destornillador de ajuste iremos girando muy lentamente el núcleo del segundo hasta conseguir la máxima intensidad.
5) Ahora probemos de sintonizar alguna emisora, moviendo el condensador del Oscilador Local y a la vez reajustando con el de sintonía de antena. Recorramos la banda de Onda media de un extremo a otro, comprobando que siempre podemos encontrar el punto de máxima intensidad de la señal actuando sobre el de sintonía.
Si hemos hemos obtenido los resultados anteriores ya podemos decir que tenemos un receptor Superheterodino funcionando, aunque está claro que tener que ir moviendo dos mandos para buscar las emisoras no es lo ideal. Aquí es donde deberemos encontrar un condensador variable doble que podamos utilizar.
Al principio de construir el tablero N-ieP, monté uno doble, pero al ser un material aprovechado que tenía guardado en cajas desde hacía más ce 40 años, resultó que no estaba en condiciones, hacía mucho ruido la girarlo y hasta en una zona se comunicaba las placas entre sí, lo cual indicaba que la lámina aislante de plástico estaba rota.
Lo desmonté y después de luchar con las pinzas y la lupa durante un par de horas, de dos malos, conseguí hacer uno bueno. Así que el condensador que tengo fijo en el tablero ahora es de más capacidad pero ya no es un "tandem" que pueda utilizar en este caso. Entonces, ya que para este montaje he echado mano de algunos elementos de radiofrecuencia rescatados de la placa del viejo Lavis, también puedo usar el excelente "tandem" de dieléctrico de aire que equipaba.
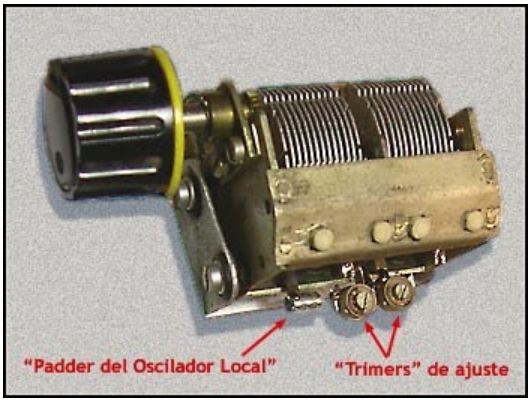
Condensador "tandem" de 430+430 pF de dieléctrico de aire, aprovechado de un viejo transistor Lavis 767, y algunos elementos soldados a sus soportes
En la imagen anterior se ven además dos pequeños condensadores variables de ajuste tipo "trimer", de 15-35 pF (también del Lavis), que he soldado directamente a los terminales del principal, y que servirán para conseguir una buena concordancia antena-oscilador al variar la sintonía.
En este caso, las dos partes de este condensador son iguales, con una capacidad que según el esquema del Lavis es de 410+410 pF, pero que medidas con un capacímetro dan 430+430. Por tanto, la parte destinada al Oscilador Local deberá tener un condensador fijo en serie para reducir su capacidad total. Veo en el esquema que el valor de este "padder" es de 560 pF. que también he soldado al condensador variable principal
Tras una hora de pruebas el receptor ha quedado listo. En realidad, conseguir la concordancia ha resultado más fácil de lo que me temía. El proceso de ajuste ha sido el siguiente:
1) Con los dos "trimers" a mitad de su capacidad y el condensador variable a la máxima, desplazo la bobina de antena sobre la ferrita para encontrar el punto en que el ruido de fondo sea máximo.
2) Voy abriendo lentamente el condensador variable hasta sintonizar una emisora, reajusto la bobina de antena
3) Abro casi todo el condensador variable, sintonizando una emisora fuerte. Reajusto el "trimer" de antena (el situado más a la derecha) para conseguir el mayor volumen.
4) Recorremos de nuevo toda la banda, comprobando que de forma razonable se mantiene el mejor ajuste de antena.
Estos componentes y valores son procedentes del Lavis, y por tanto también deberían funcionar aquí sin problemas, y sin embargo el circuito que he utilizado no es exactamente igual ni tampoco lo es la base de montaje respecto a su circuito impreso original, con lo cual su comportamiento final puede variar en un margen bastante amplio. Si con estos sencillos pasos no podemos conseguir un buen ajuste de antena en toda la gama, el truco está en variar ligeramente el ajuste del núcleo de la bobina osciladora, y repetir el proceso. Normalmente notaremos un aumento o disminución de la concordancia, los cual nos dará la pista del sentido correcto que hemos de dar al ajuste.
Sin duda, tal como me ocurrió a mí, tras unas cuantas repeticiones se va a conseguir un buen resultado.
Montaje definitivo del Superheterodino de cuatro transistores, ya equipado con el condensador variable en tandem de 430+430 pF
Tras este ajuste ya podemos darnos por satisfechos. El receptor Superheterodino N-ieP tiene la mejor sensibilidad y selectividad de todos cuanto he hecho hasta ahora. Durante el día capta muy bien unas diez emisoras lejanas (en mi ciudad no hay locales), que aumentan a más de cuarenta en la noche. La estabilidad de frecuencia también es muy buena, permaneciendo en el mismo punto durante horas sin necesidad de reajustar el mando de sintonía, y el consumo y la distorsión se mantienen muy bajos, y el volumen de audio es suficiente para una habitación mediana.
Etapa osciladora-mezcladora. Observar los dos condensadores "trimer" de ajuste soldados en el lateral del condensador variable principal
En resumen, creo que ha sido un montaje muy interesante para aprender los fundamentos de este tipo de receptores y a la vez practicar con ajustes de frecuencia que no habíamos tenido oportunidad de realizar en los montajes anteriores.
Y para acabar, veamos una corta filmación del funcionamiento del Superheterodino:
Prueba de funcionamiento de nuestro receptor Superheterodino
Un saludo a todos y recordar que estoy aquí para cualquier duda o comentario...
Última edición por Llorens el Mié Oct 01, 2025 5:24 pm, editado 3 veces en total.
Tengo más montajes con el NieP, pero no aburrir con cosas semejantes, paso a otro tema:
En robótica se utilizan todo tipo de sensores de presión y de flexión, y entre los que han aparecido hace poco tiempo son los llamados "de flexorresistencia", formados por una cinta flexible de cierta longitud que tiene serigrafiada una resistencia de características especiales, cuyo valor cambia de forma más o menos proporcional al flexionar la cinta. Estos sensores se utilizan por ejemplo en los "guantes sensibles", que te los pones y mediante el movimiento de abrir o cerrar la mano puedes controlar el mismo movimiento en una mano robótica. Supongo que tales sensores también se podrían utilizar para medir pesos, aunque ignoro la estabilidad de las lecturas que puede dar frente a cambios de temperatura o a flexiones constantes...
Pues bien, estos sensores se pueden encontrar en ebay de todos lo tipos y medidas, desde pocos centímetros de longitud hasta más o menos treinta centímetros. Pero tienen un problema: son caros, con precios que oscilan entre los 10 y los 40 €, y como por ejemplo se tenga que "sensorizar" un guante, la broma nos puede salir por más de 100 €...
...Además está el placer del DIY (el "Do It Yourself" o "hágalo usted mismo"), sin el cual a buen seguro, muchos no estaríamos aquí. Por este motivo he estado pensando en la manera "casera" de fabricar un flexosensor. En principio pensé en un pequeño potenciómetro deslizante activado por un hilo que se pondría tirante al doblarse el soporte flexible... pero es un sistema algo chapuza, abultará mucho y tanto la variación de resistencia como el margen dinámico pueden ser insuficientes...
...Entonces se me ocurrió un principio distinto. ¿y si tomamos una fibra óptica "mala" y le aplicamos un emisor de luz en un extremo y un captador en el otro? ¿la señal no debería caer en grado apreciable al doblarla?
Como fibra óptica "mala" he utilizado trozos de unos 8 cm de longitud de hilo de nylon del que se utiliza para colgar cuadros. Este hilo tiene 2 mm de diámetro y naturalmente es muy flexible. Como emisor y receptor he utilizado los componentes de uno de estos típicos sensores de final de carrera en forma de U, el diodo emisor de infrarrojos y el fotodiodo o fototransistor receptor, y los he pegado con epoxi transparente para unir las caras ópticas y cianocrilato para reforzar en ambos extremos del hilo, al que naturalmente, como al emisor y al receptor, he metido en funda termorretráctil para evitar la influencia de la luz ambiente... Y la cosa ha funcionado. Alimentando el diodo emisor con 20 mA, y el "receptor" conectado a un téster en modo óhmetro, al doblar el hilo de nylon la resistencia medida pasaba de 1 a 5 Mohms para un ángulo de doblez de 180º, con una proporcionalidad que parecía buena y un buen retorno al valor inicial...
Partiendo de un final de carrera por infrarrojos y de pequeñas tuercas empotrables de rosca 2 mm (utilizadas en una segunda prueba)...
La segunda prueba la he hecho prescindiendo de la resina epoxi para pegar el hilo a los elementos terminales, pegando en cambio dos pequeñas tuercas de 2 mm. al emisor y al receptor y haciendo "rosca" de esta medida en los extremos del hilo de nylon con una pequeña "hembra de rosca" que me he fabricado... Y el resultado de esta conexión ha sido mucho mejor, la variación ha bajado el pedestal y ha subido el margen dinámico, ahora entre 100 y 900 Kohms...
...y de hilo de nylon de 2 mm. para colgar cuadros, y de un improvisado "roscador" fabricado en 5 minutos...
...ver del detalle algo ampliado de la rosca en el hilo de nylon...
...y del mismo con la tuerca insertada. Una de estas tuercas irá pegada con cianocrilato al emisor de infrarrojos y otra al receptor...
Y la tercera prueba la he realizado utilizando un diodo de infrarrojos de mando a distancia, sin duda más potente, en vez del emisor original, mejorando muchísimo la sensibilidad a la flexión, que ahora va desde 10 K hasta los 200 K. manteniendo buena proporcionalidad y un excelente retorno al punto de origen.
Las tres piezas del sensor "flexóptico" (como se me ha ocurrido bautizarlo). Siendo independientes me permitirá ir haciendo pruebas cambiando los componentes activos y la longitud del hilo
El sensor montado. Con este tercer modelo he obtenido una excelente respuesta a la flexión, de 10 a 200 Kohms, desde el estado de reposo hasta los 180º, es decir, doblado en forma de U...
Sin duda serán necesarias más pruebas, ya que algunos trozos de hilo con algo de curvatura previa parecen presentar un extraño efecto asimétrico en su "resistencia óptica", que no es mínima estando recto, si no con cierta doblez en el mismo sentido de la original, e incluso algo mayor a ésta. Otro efecto óptico se reveló al contraer el tubo termorretráctil con un mechero, ya que el nylon se calentó y tanto el valor "pedestal" como la dinámica, cambiaron de golpe, supongo que por modificar las tensiones internas del material que a su vez alteran los índices de refracción puntuales...
En fin, la idea como sensor de flexión parece aprovechable, y además abre la curiosidad a algunos fenómenos de transmisión de luz en medios, digamos, "semiconductores"...
Continuará... Saludos a todos.
Última edición por Llorens el Mié Oct 01, 2025 5:24 pm, editado 2 veces en total.
Venga, como veo que no hay preguntas ni comentarios de lo anterior, sigo con el tema ...que está resultando ser algo más complejo de lo que parecía en un principio. El proceso físico por el que la luz infrarroja sale del diodo emisor y llega al fotodetector a través de un hilo de nylon, es cualquier cosa menos fácil de interpretar, ni siquiera siguiendo las leyes de la óptica. Creo que comenté lo extraño de una de las fibras que perecían tener el "eje" óptico no coincidente con el eje físico, así como los cambios que se experimentaban en la transmisión total al alterar la temperatura del hilo hasta el punto que el nylon se volviera blando...
La situación de diferencia entre ejes parecía "polarizar ópticamente" el dispositivo, de manera que con independencia de la posición de reposo del hilo, adquiría una especie de sensibilidad de signo contrario dependiendo de la curvatura a la que se forzara, disminuyendo al flexionar de una manera y aumentando al flexionar en la contraria... pues esa característica, que me apareció sin buscarlo y contra toda lógica en una de las muestras de hilo que probé, he encontrado la manera de provocarla, así como de "borrarla"...
En fin, que como sensor robótico de flexión me interesa, pero como fenómeno físico aún más... La secuencia de tres fotos que viene a continuación, muestra el montaje del sensor, cuya señal de salida va a una entrada analógica del Arduino, que a su vez, el programa utiliza para mover proporcionalmente el servo situado sobre la protoboard, a la derecha de la imagen.
En esta secuencia de tres imágenes puede verse primero el sensor en reposo y el servo en posición central...
...Ahora con el sensor doblado hacia arriba y el servo girado unos 80º en sentido de las agujas del reloj...
...Y aquí con el sensor doblado hacia abajo y el servo girado 80º en sentido contrario...
Este sensor concreto, al que llamaría "modelo-04" (por haber sido el 4º que he hecho), tiene su máxima sensibilidad en un plano de flexión, disminuyendo hasta anularse cuando la flexión se realiza perpenticularmente a este plano. El movimiento del servo es bastante proporcional con la flexión, y de uno u otro sentido dependiendo de ésta. En cuanto al grado de desvío del servo, depende de la magnitud y centrado que se le dé por software...
La salida del sensor para una flexión hacia al uno y otro lado de más o menos 90º genera una tensión analógica entre 1,71 y 3,82 Volts, que se transforma en el conversor A/D del Arduino en un valor entero entre 350 y 782 de una escala máxima que va desde 0 a 1024. El servo se mueve de un lado a otro dándole un valor en grados de 0 a 180, que para evitar que el mecanismo pueda llegar a los topes mecánicos y forzar los engranajes, reduzco 10 grados para cada extremo, quedando el giro (siempre más o menos, porque el servo es analógico) entre 10 y 170 grados. Que la escala de la lectura analógica del sensor se adapte a otra es cuestión de una simple regla de tres más una constante.
Ah, y no aplico ningún tipo de polarización a los infrarrojos...
El programa Arduino de este montaje es;
******************************************* #include <Servo.h> // incluye librería Servo.h Servo servo_1; // define un objeto tipo Servo float valor; // variable decimal para valor leído del sensor y luego movimiento de servo
void setup()
{
servo_1.attach(2); // activa salida servo_1 en el pin 2 }
void loop()
{
valor = analogRead(A0); // lee valor tensión analógica proveniente del sensor flexóptico valor = (valor * 2 * 180 / 1024) - 110; // convierte a movimiento de servo x2 y centra punto medio
if (valor>170){valor=170;} // limite superior de movimiento de servo if (valor<10){valor=10;} // limite inferior de movimiento de servo
servo_1.write(valor); // mueve el servo a la posicion "valor" delay(20); // pausa de 20 milisegundos (repetición de ciclo unos 50 Hz) }
*******************************************
Aquí un vídeo (sin sonido) del funcionamiento del sensor:
Continuará... Un saludo a todos.
Última edición por Llorens el Mié Oct 01, 2025 5:24 pm, editado 1 vez en total.
El siguiente paso para utilizar este sensor de flexión será controlar una pinza robótica que compré en Aliexpress hace algún tiempo y aún no he utilizado.
Esta pinza es de aluminio y funciona acoplándole un servo estandar de 20 gramos, así que se controla con el mismo programa de prueba anterior. Con la salvedad que dicho servo necesitará una alimentación aparte, ya que su elevado consumo haría caer el protector de sobreintensidad del Arduino. Así pues lo conecto y hago las primeras pruebas, primero prescindiendo del sensor flexóptico y utilizando un potenciómetro como mando de control...
A la vez estoy pensando que sería interesante tener en un sistema que permita "sentir" la presión de la pinza sobre el objeto que sostiene. Esto puede hacerse con sensores de presión en los extremos de "los dedos" de la pinza, pero no tengo tales sensores, y además he pensado en un sistema más directo y económico en que no son necesarios, basado en medir la corriente del servo, que una vez filtrada de la forma adecuada será bastante proporcional a la fuerza que ejerza...
Para medir la corriente utilizaré la caída de tensión en una resistencia de 1 Ω, que con el servo alimentado a 4,5 Volts me da señales de 0,44 Volts a fondo de escala... bien medibles con el Arduino con su conversor ADC (Analog-Digital Converter) programado a 1,1 Volt, lo que me da valores del 40% de la escala de 0-1023, así que hay suficiente resolución. En la siguiente imagen estoy leyendo precisamente la amplitud de las señales del servo cuando está ejerciendo fuerza con la pinza cerrada al máximo...
...Entonces, con esta señal bien filtrada para conseguir un nivel de continua de variación lenta, comando un pin de salida PWM que activa un transistor BD137 como driver de un diminuto motor de vibración, de los que llevan los teléfonos móviles en su interior, y que refleja en su velocidad de giro la presión estática de la pinza.
El programa experimental de control es el siguiente:
******************************************* #include <Servo.h> Servo servo_1; // crea objeto servo int val_0; // variable para leer pin analógico int val_1; int aval_1;
================== void setup() { Serial.begin(9600); // arranca comunicación serie servo_1.attach(9); // arranca servo en pin 9 analogReference(INTERNAL); // establece los 1.1 Volts como referencia del ADC delay(1000); }
================== void loop() { val_0 = analogRead(0); // lee valor potenciometro en pin 0 val_0 = map(val_0, 0, 1023, 0, 180); // reduce 0-1023 a 0-180 servo_1.write(val_0); // escribe posición de servo
val_1 = analogRead(1); // lee valor de tensión en R 1 Ohm if (val_1 != aval_1) // si valor no cambia, no lo imprime en monitor serie { Serial.println(val_1); // imprime valor en monitor serie aval_1 = val_1; // actualiza valor para siguiente comparación } analogWrite(11, (val_1 * 2)); // comanda motor de vibración feedback
delay(50); // espera para nueva lectura }
*******************************************
Una vez ajustados los parámetros, tanto el hardware como el programa funcionan bien. Cuando la pinza comienza a apretar algún objeto o simplemente llega a los topes de cerrada o abierta, aumenta su consumo, el Arduino lo detecta y de forma proporcional arranca el motor vibrador en la punta de mis dedos.
Seguidamente he sustituido el potenciómetro por mi sensor flexóptico. No ha sido difícil, el único problema lo han planteado los cables bastante largos y sin blindar, que me inducían zumbido de 50 Hz en la entrada analógica del Arduino, que he podido eliminar con un simple condensador de 4,7 uF.
En las siguientes imágenes puede verse la secuencia de la pinza abierta-cerrada siguiendo el movimiento de la mano, siendo naturalmente todo ello ajustable por software, tanto en ganancia como en posición media
...La progresividad y la respuesta es excelente. En cuanto a la manera de sujetar el sensor flexóptico, he probado varias posiciones y la de mejor resultado ha sido la que se ve en las imágenes, sujeta en el lateral del dedo índice, que no molesta en absoluto y ofrece buena sensibilidad para el movimiento. Hoy lo he sujetado de forma improvisada con gomas elásticas, pero estoy pensando en un sistema más práctico para poner y quitar, y que sea también algo más estético.
Lo siguiente será integrar el actuador de vibración, modificando el programa para que pueda diferenciarme el consumo del servo al moverse y el consumo de "carga", cuando las pinzas ejercen fuerza sujetando un objeto o al llegar a ambos topes.
...Sobre este tema, pienso que algún día construiré una mano robótica completa, pero de momento esto son solamente pruebas para testar mi "invento" del sensor flexóptico. El resto son cosas que se pueden comprar.
En cuanto al propio sensor, lo he remodelado para mejorar su estética y la forma de montarlo. Los hilos relativamente gruesos del fototransistor situado en el extremo los he sustituido por hilo esmaltado de una décima y media arrollando en forma de espiral y fijado con pegamento muy suave para permitir la flexión sin que se tensen. A la vez he utilizado el cable con conector PS-2 de un teclado de PC fastidiado para conectar el sensor al circuito del Arduino...
...Este cable contiene cuatro hilos más malla de blindaje, lo cual vendrá bien para eliminar las posibles interferencias externas, como el zumbido de la red. En la siguiente imagen se ve el sensor con más detalle, bastante más fino y práctico que las primeras versiones.
He dudado si incluir en este cable la conexión del mini-motor de vibración, pero al final lo haré con un cable aparte, porque quiero probar varios tipos distintos y además así evito las posibles influencias en los cables de señal. También he comprado por 1,5€ un par de guantes de jardinería de un chino. La idea ha sido cortar parte de la mano izquierda para dejar libres todos los dedos excepto el índice, que será donde montaré el sensor, ya a la vez mantener parte del soporte en la palma y el lomo de la mano.
En esta otra imagen ya tengo listo el "semi-guante" de control de pinza robótica, al menos en lo que concierne al sensor flexóptico. Al final ha bastado coser tres piezas del mismo material para poder sujetar el sensor en el lateral derecho del dedo indice, quedando el resto libres para moverse...
El "semi-guante" de control robótico, con la mano extendida
Las piezas del mismo material del guante (de hecho son fragmentos del trozo recortado), están cosidas de forma que sujetan firmemente el sensor pero a la vez éste puede extraerse sin dificultad.
Con la mano cerrada
En la imagen anterior también puede verse en la parte izquierda del guante el sistema de apertura y cierre mediante velcro, que permite una rápida colocación y permite que se adapte a distintos tamaños de mano...
Detalle lateral de la flexión del sensor al cerrar la mano
Pasado unos días, y una vez solucionados algunos problemas de inestabilidad que en realidad eran causados por contactos defectuosos de la protoboard, efectué algunos cambios en el software y el sistema quedó a punto de montaje.
El actuador de vibración, como ya he dicho alguna vez, está basado en el motorcito de un teléfono móvil. El motor es muy pequeño pero no puede estar suelto, puesto que el rotor asimétrico va a chocar con la mano o con el guante y va a dejar de girar. Para evitarlo lo introduzco a modo de carcasa en un tubito de latón, procedente de una vieja antena de radio rota.
El minimotor-vibrador recuperado de un teléfono móvil y el tubito de latón que hará de carcasa
Una vez colocado el motor en su carcasa y correctamente alineado, lo fijo con resina epoxi, sueldo los cables aprovechados de un mouse estropeado y protejo todo el conjunto con funda termorretráctil.
El motor ya está colocado en su carcasa, unido al cable de alimentación y protegido con funda termorretráctil
Detalle del extremo del motor. El rotor de vibración se intuye en el extremo
En cuanto a la fijación del actuador vibratorio en el guante, he probado varios puntos y al final he decidido colocarlo entre los dedos índice y pulgar, en una zona de piel bastante sensible y que no molesta al movimiento de la mano al cerrarla.
El actuador de vibración montado en el guante sensible, entre el dedo índice y pulgar
Así pues, este sistema basado en un sensor de flexión propio, cuya construcción no cuesta ni 10 cts. está funcionando muy bien, y no costaría nada montarlo en una caja aparte con sus conexiones y su alimentación. La placa microcontroladora Arduino UNO puede sustituirse por la NANO o la MICRO, con lo cual la parte del circuito quedaría realmente pequeña y todo ello sería autónomo para llevarlo de un sitio a otro o efectuar demostraciones.
Este nuevo proyecto tiene algo que ver con el anterior, aunque es más reciente, de hace poco más de un año. También involucra a una pinza robótica con "feedback" y la placa Arduino UNO, con algo de electrónica y programación...
Digo que tiene algo que ver pero a la vez es muy distinto y nació al ver este corto vídeo en una red social...
Observar que son dos pinzas, una de control y la otra actuadora, que se mueven de manera sincronizada, pero, y esto es importante, de forma reversible, con lo cual en la pinza de control debería "sentirse" la presión que la actuadora está ejerciendo sobre un objeto...
...Aquí el "feedback" o realimentación de la actuadora sobre el control no vuelve en forma de un un zumbido o una vibración mecánica, como en mi anterior montaje, si no se en el mando en que actúas para controlar la pinza remota, "notas" la resistemcia mecánica con que actúa en cada instante... y esto es bastante más complicado de conseguir de lo que parece en un principio, al menos en sistemas pequeños, ya que desde hace muchos años los sistemas servoasistidos de corriente alterna trifásica se utilizan en la industria y en dispositivos de marina y de aviación... pero es algo voluminoso, pesado y naturalmente que necesita corriente alterna trifásica senoidal...
Pues bien, como a veces el interés por algún tema nace de detalles tan fugaces como este vídeo. Me propuse construir algo que hiciera lo mismo, auqnue claro está sin llegar al punto de imprimir una pinza en 3D ni cosas similares...
Para comenzar tengo que construir dos servos con materiales comunes. Dos motores cuyo eje pueda girar a mano a los que asociaré un potenciométro como control de referencia. Así que compruebo algunos de estos motores chinos "amarillos" para encontrar dos que sean lo más semejantes posible.
Estos motores con desmultiplicación 48:1 son muy baratos, como 2 € cada uno, pero también de baja calidad, además, de entre los que compré hace un par de años me encuentro que a muchos se les ha soltado el engranaje primario, el que va al eje del motor, que de fábrica estaría solo pegado, y es algo que necesitaré reparar...
Primero le hago un pequeño corte al eje con disco de diamante. Luego retiro la grasa del engranaje con un disolvente, lo inserto en el eje, le hago un agujero transversal de 0,8 mm que coincide con el corte y le añado un pasador de acero del mismo grosor... Así ya no se soltará.
Otra de las modificaciones que les hago a estos motores es reducir la desmultiplicación de los engranajes, que de original es 48:1, y resulta muy "duro" para hacer girar a mano. Estudiando la mecánica interna veo que retirando un engranaje y soldando otro libre al eje de salida, consigo bajar la relación a 14:1...
...Estos motores así modificados los marco como "Fast", tienen menos fuerza, claro, pero también más velocidad y menos resistencia al giro y juego de tolerancia, así que espero que añadiéndoles una potenciómetro al eje de salida se convertirán en una especie de servo adecuado a este proyecto...
Así pues, utilizando hojalata construí el soporte para fijar el cuerpo del potenciómetro de 10 K. Mientras que el disco ranurado me permitirá sujetar un par de pinzas sobre las que ejercerá la fuerza mecánica...
Aquí otra visión del montaje en que se aprecian los tornillos de sujeción, aprovechando los agujeros que originalmente tiene la carcasa de estos motores...
Las pinzas son de metacrilato de 3 mm. Una está fija sobre la carcasa del motor y la otra es móvil sobre el eje. Aquí un vídeo del funcionamiento inicial, aún no servocontrolado y a una tensión demasiado baja (poco par). Como circuito driver del motor utilizo el "Shield" de Arduino L293D.
Y aquí me paro por hoy. Mañana continuaré mostrando un poco más de este pequeño proyecto, y solo recordar que sigo aquí para cualquier duda o comentario sobre estos temas.